快速入门
蓝桥杯嵌入式赛道开发板板载资源:
| 资源 | 配备 | 资源 | 配备 |
|---|---|---|---|
| LCD | 1 | 可编程电阻 | 1 |
| 按键 | 4 | 信号发生器 | 2 |
| LED | 8 | 可调分压电位器 | 2 |
| E2PROM | 1 |
- 使用
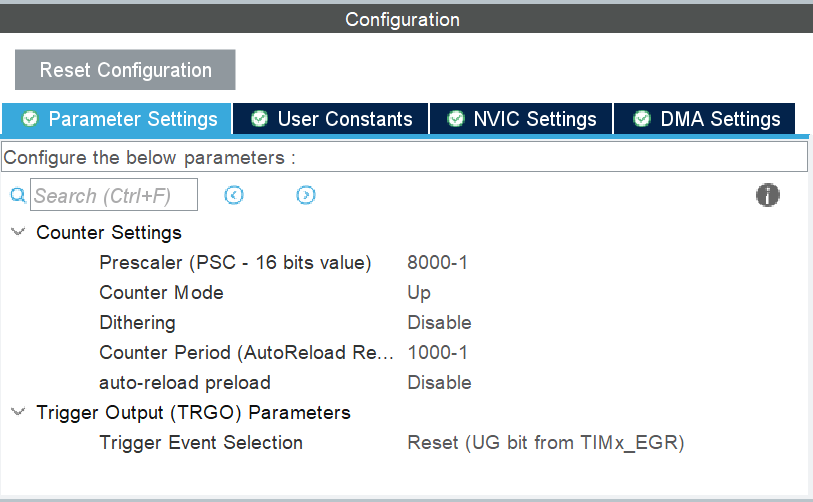
TIM7作为硬件定时器,中断间隔为10ms - 使用
TIM16作为Hal库的时基定时器 stm32CubeMX版本 6.11.0
基础配置
日志配置
由于比赛的限制,本项目的日志设计的非常简单,只包含debug和error标签,并且,使用printf进行二次封装。
/* if define DEBUG,open debug and error */
#ifdef DEBUG
#define debug(format, ...) \
printf("[debug] "format"\n", ##__VA_ARGS__)
#define error(format, ...) \
printf("[error] "format"\n", ##__VA_ARGS__)
#else
#define debug(format, ...)
#define error(format, ...)
#endif
硬件定时器
在比赛中,是可以使用软件定时器,但是,无法满足某些应用场景,比如:
- 调用的软件定时器RTOS接口,无法在中断中开关软件定时器
- 软件定时器是无法在线程阻塞时,中断线程的
所以,需要实现一个简单的硬件定时。
由于比赛时间的限制,无法真正的写一个硬件定时器,选择对硬件定时器进行代码层面规范。
硬件定时器初始化配置

以下是硬件定时器的模板回调函数:
static uint8_t <name>count = 0;
// 回调应用函数
void <name>Callback(void) {
<name>count++;
if (<name>count >= <count time>) {
<name>count = 0;
// 应用代码
}
}
基础初始化配置
cubx配置
配置调试接口:
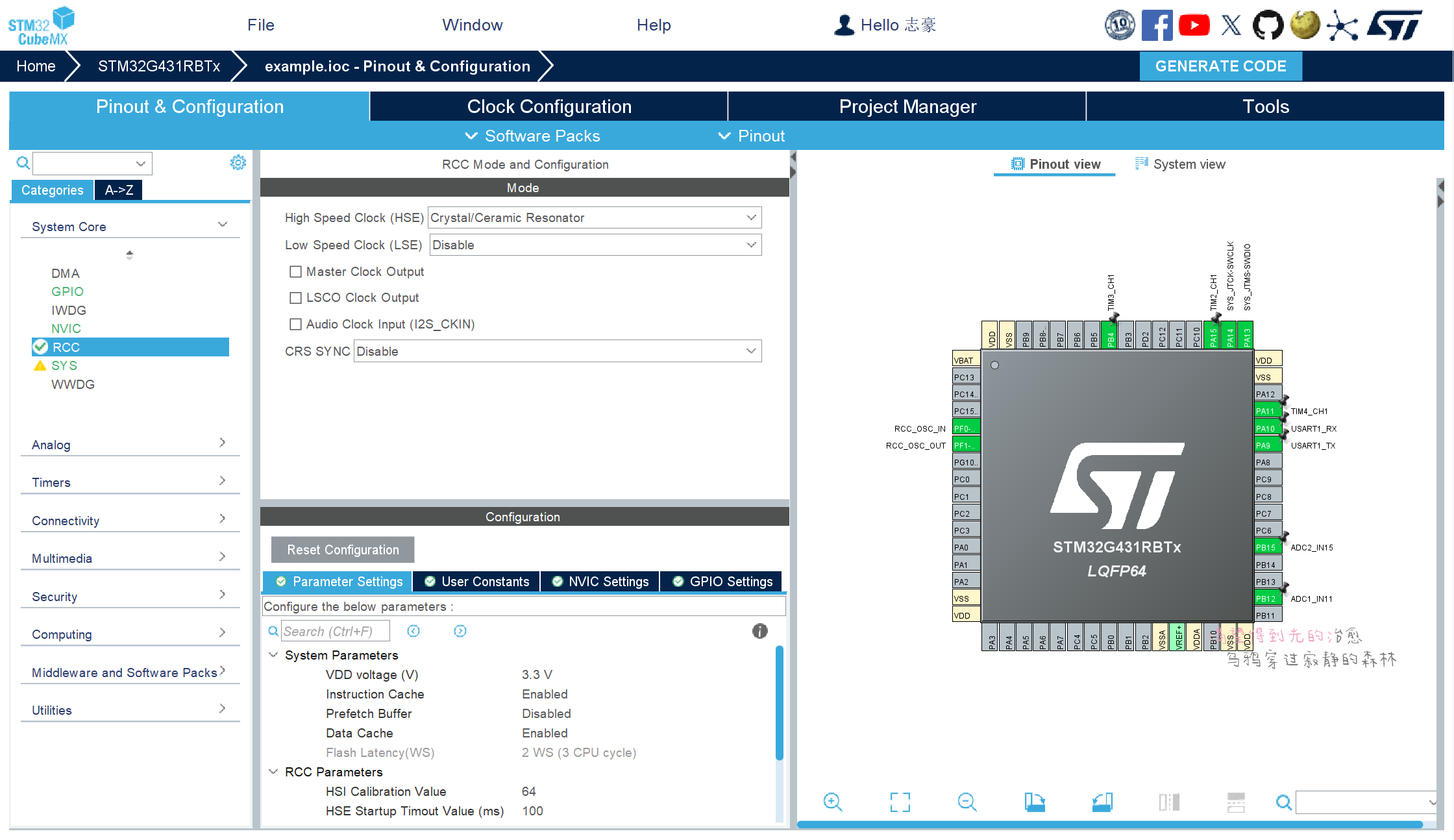
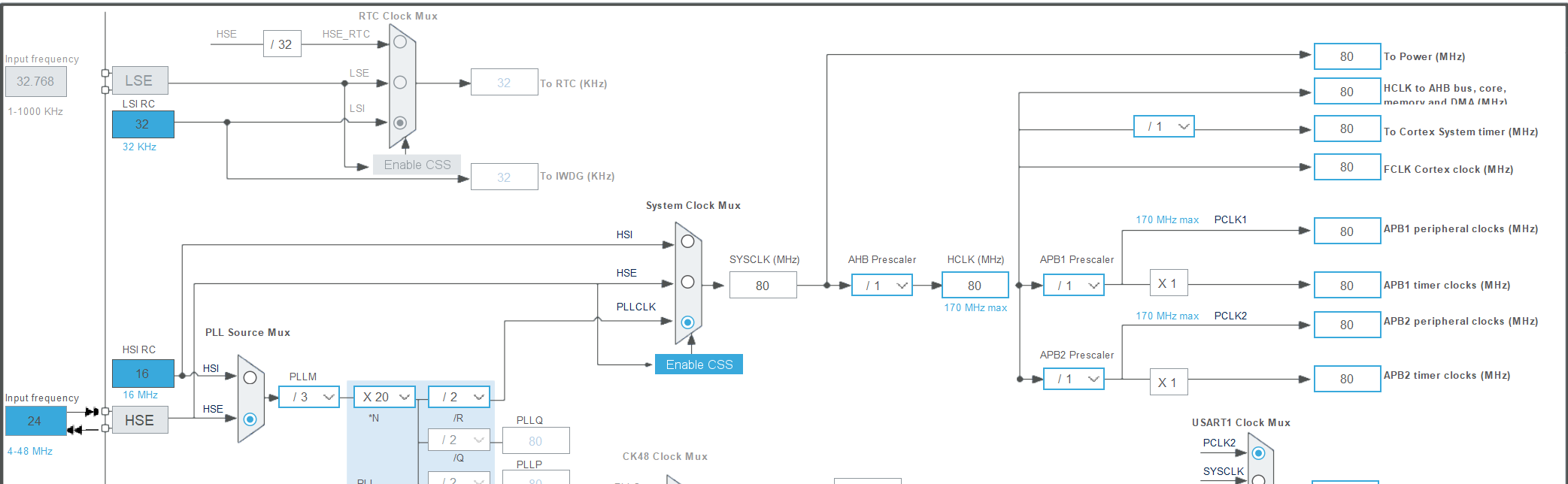
配置RCC时钟:
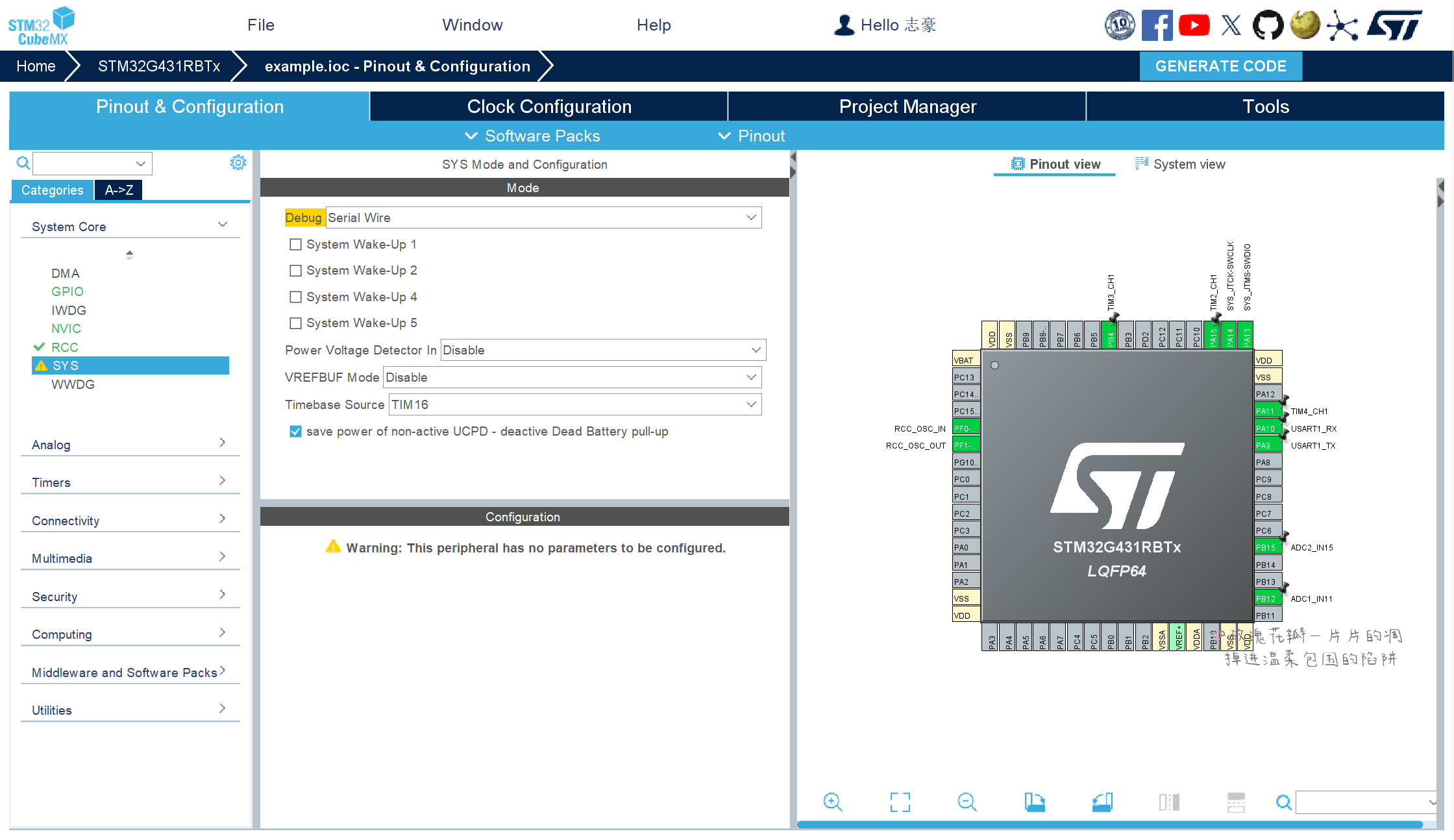
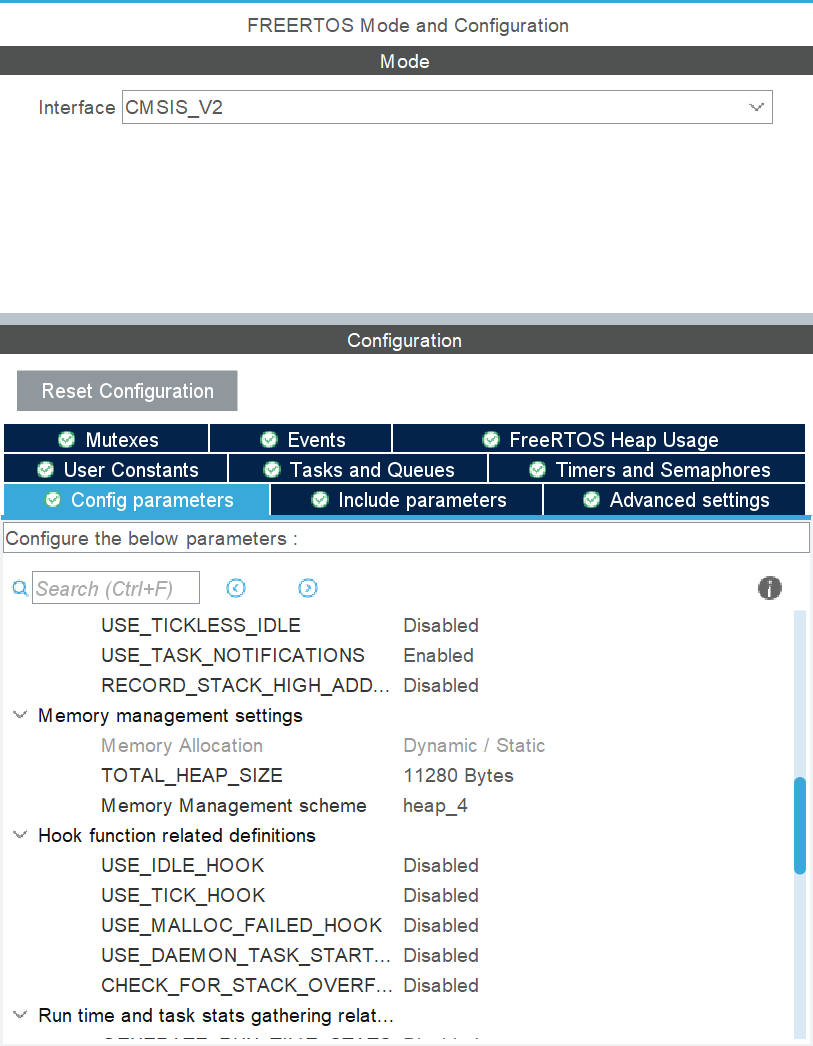
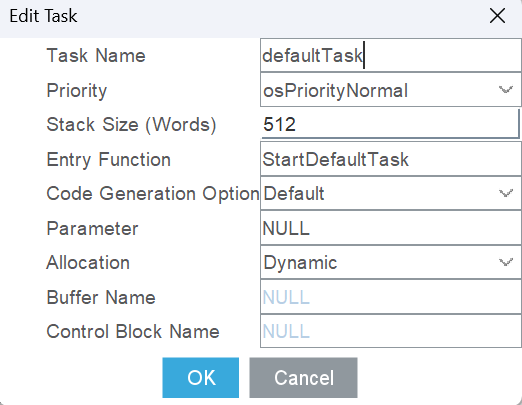
配置FreeRTOS:
代码配置
初始化拆分为外设初始化和应用程序初始化
外设初始化,在调度器开始之前,用于初始化LED、LCD... 应用程序初始化,在调度器开始之后,用于
#include "app.h"
#include "FreeRTOS.h"
// 引荐初始化
void Hardware_Init(void){
}
int app(void){
debug("sum free:%d",xPortGetFreeHeapSize());
if(xPortGetFreeHeapSize() == 0){
goto ERROR;
}
return 0;
ERROR:
return -1;
}
#ifdef __CC_ARM
int fputc(int ch, FILE *stream) {
while ((USART1->ISR & 0X40) == 0); //等待上一次串口数据发送完成
USART1->TDR = (uint8_t) pBuffer[i]; //写DR,串口1将发送数据
return ch;
}
#elifdef __GNUC__
int _write(int fd, char *pBuffer, int size) {
for (int i = 0; i < size; i++) {
while ((USART1->ISR & 0X40) == 0); //等待上一次串口数据发送完成
USART1->TDR = (uint8_t) pBuffer[i]; //写DR,串口1将发送数据
}
return size;
}
#endif
#ifndef __APP_H
#define __APP_H
#include "main.h"
#include "cmsis_os2.h"
#include <stdio.h>
/* 调试文件 */
#ifdef DEBUG
#define debug(format, ...) \
printf("[debug] "format"\n", ##__VA_ARGS__)
#define error(format, ...) \
printf("[error] "format"\n", ##__VA_ARGS__)
#else
#define debug(format, ...)
#define error(format, ...)
#endif
定义app的接口需要将app()和hardware_init()引用在main.c中,以下是代码:
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
//...
MX_GPIO_Init();
MX_TIM7_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
Hardware_Init();
/* USER CODE END 2 */
/* Init scheduler */
osKernelInitialize();
//...
}
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
if (app() != 0) {
Error_Handler();
}
osThreadExit();
/* USER CODE END 5 */
}
请务必在main.c文件开头声明app()和hardware_init()
外��设
串口
对于串口外设来说,发送比较简单,是需要重定向printf()即可,但是,对于接收有一点过的难度,所以,只对接收进行模块化。
这里将串口接收抽象出来,使其只需要关注对于buf进行应用,以下是代码:
#include "app.h"
#include <stdio.h>
#include <string.h>
static uint8_t rx_buf[20];
static uint32_t count = 0;
void UsartTask(void *arg) {
HAL_UART_Receive_IT(&huart1, rx_buf, 1);
// 清除tim
__HAL_TIM_SET_COUNTER(&htim7, 0);
// 清除tim更新中断标志
__HAL_TIM_CLEAR_IT(&htim7, TIM_IT_UPDATE);
// 缓存区清零
memset(rx_buf, 0, sizeof(rx_buf));
while (1) {
osSemaphoreAcquire(uartBinarySemHandle, osWaitForever);
HAL_UART_Abort_IT(&huart1);
/* 接收buf 应用代码 开始 */
/* 接收buf 应用代码 结束 */
HAL_UART_Receive_IT(&huart1, rx_buf, 1);
memset(rx_buf, 0, sizeof(rx_buf));
count = 0;
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
if (huart->Instance == USART1) {
__HAL_TIM_SET_COUNTER(&htim7, 0);
HAL_TIM_Base_Start_IT(&htim7);
// 计数
count++;
HAL_UART_Receive_IT(huart, rx_buf + count, 1);
}
}
uint8_t uart_count = 0;
void UartCallback(void) {
uart_count++;
if (uart_count >= 1) {
uart_count = 0;
HAL_TIM_Base_Stop_IT(&htim7);
__HAL_TIM_CLEAR_IT(&htim7, TIM_IT_UPDATE);
__HAL_TIM_SET_COUNTER(&htim7, 0);
osSemaphoreRelease(uartBinarySemHandle);
}
}
LCD
为了方便LCD的数据写入,需要对LCD显示字符串进行改写,使其增加x方向显示�,使字符显示更加精确。
void LCD_StringLine(uint8_t Line, uint8_t x,uint8_t *ptr)
{
uint32_t i = 0;
uint16_t refcolumn = (319 - (x * 16)); //319
while ((*ptr != 0) && (i < 20)) // 20
{
LCD_DisplayChar(Line, refcolumn, *ptr);
refcolumn -= 16;
ptr++;
i++;
}
}
按键
根据以往的比赛经验,对于按键来说,只需要实现单击、双击、长按。
这里使用通过:
- 扫描按键线程
- 使用软件定时器判断按下次数
- 使用硬件定时器判断长按
#include "app.h"
#include <stdio.h>
static uint8_t Key1Value = 0;
static uint8_t Key2Value = 0;
void KeyTask(void *arg) {
while (1) {
if (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0) {
if (Key1Value == 0) {
osTimerStart(key1TimerHandle, 150);
}
while (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0);
Key1Value++;
}
if (HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == 0) {
if (Key2Value == 0) {
osTimerStart(key2TimerHandle, 150);
}
while (HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == 0);
Key2Value++;
}
osDelay(50);
}
}
void Key1Callback(void *arg) {
lcdData_t *lcd_data;
debug("key1 value:%d\n",Key1Value);
if (Key1Value == 1) {
LcdPsd_Data(lcdData_key);
lcd_data = (lcdData_t *) osMemoryPoolAlloc(lcdMemoryPoolHandle, 0);
lcd_data->flag = 3;
osMessageQueuePut(lcdQueueHandle, &lcd_data, 0, 0);
} else if (Key1Value == 2) {
} else {}
Key1Value = 0;
}
static uint8_t led_data = 0;
void Key2Callback(void *arg) {
debug("key2 value:%d\n",Key2Value);
if (Key2Value == 1) {
} else if (Key2Value == 2) {
} else {}
Key2Value = 0;
}
LED
对于蓝桥杯嵌入式的板子,并没有直接使用IO口连接LED,而是通过一个74HC573控制LED,实现了对IO的复用和LED的状态锁存。
74HC573 真值表:
| 输入 | 输出 | ||
|---|---|---|---|
| Output Enable | Latch Enable | D | Q |
| L | H | H | H |
| L | H | L | L |
| L | L | X | no change |
| H | X | X | Z |
根据真值表,得到一个事实,只有当LD为低电平时,才能改变LED状态。而且8个LED是依次排布的7~15,所以,当配置好了LED后,只需要操作ODR寄存器和改变LD引脚状态,就可以改变LED状态。
驱动代码如下:
#define LD_GPIO GPIOC
static uint16_t led_status = 0xff00;
/**
* LED id
*/
typedef enum {
LD1 = 0,
LD2,
LD3,
LD4,
LD5,
LD6,
LD7,
LD8
} Led_Id;
/**
* 控制LED引脚电平
* @param id LED id
* @param pin_state 电平状态
*/
void LedWrite(Led_Id id, GPIO_PinState pin_state) {
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
if (pin_state) { // 1
led_status |= (pin_state & 0x01) << (id + 8);
debug("led_status:0x%x", led_status);
} else {
led_status &= ~((pin_state | 0x01) << (id + 8));
debug("led_status:0x%x", led_status);
}
LD_GPIO->ODR = led_status;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
E2PROM和可编程电阻(IIC)
由于蓝桥杯得板子没法使用硬件IIC,所以,只能使用软件IIC。
对于软件IIC,在GNUC平台上无法使用,具体是什么原因还在调试中,但是在MDK平台中是可以正常使用的!
// 确保读写API一致
#define AT24C02_ADDR_WRITE 0xA0
#define AT24C02_ADDR_READ 0xA1
/**
* @brief AT24C02任意地址写一个字节数据
* @param addr —— 写数据的地址(0-255)
* @param dat —— 存放写入数据的地址
* @retval 成功 —— HAL_OK
*/
void At24c02_Write_Byte(uint16_t addr, uint8_t* data)
{
I2CStart();
I2CSendByte(AT24C02_ADDR_WRITE);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(data);
I2CWaitAck();
I2CStop();
HAL_Delay(5);
}
/**
* @brief AT24C02任意地址读一个字节数据
* @param addr —— 读数据的地址(0-255)
* @param read_buf —— 存放读取数据的地址
* @retval 成功 —— HAL_OK
*/
uint8_t At24c02_Read_Byte(uint16_t addr, uint8_t* read_buf)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
*read_buf = I2CReceiveByte();
I2CWaitAck();
I2CStop();
}
编程方式
异步编程
[!note]
备注